
The challenge of using a small UAV for avalanche monitoring is that the vehicle has a limited range (~100km), but the area of interest is […]
Vehicle-based photogrammetry system for avalanche detection
ETH student Andri Bisaz recently completed his semester thesis titled “Vehicle-based photogrammetry system for avalanche detection” as part of the AvalMapper project with the support […]
Publications
Journals [1] Hafner, Elisabeth D., et al. “Automated avalanche mapping from SPOT 6/7 satellite imagery with deep learning: results, evaluation, potential and limitations.” The Cryosphere 16.9 (2022): […]
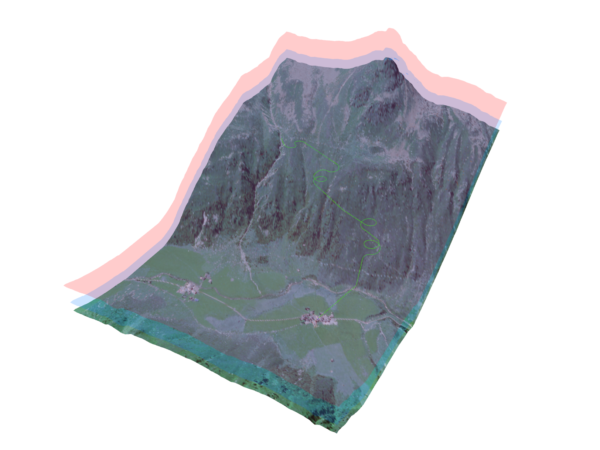
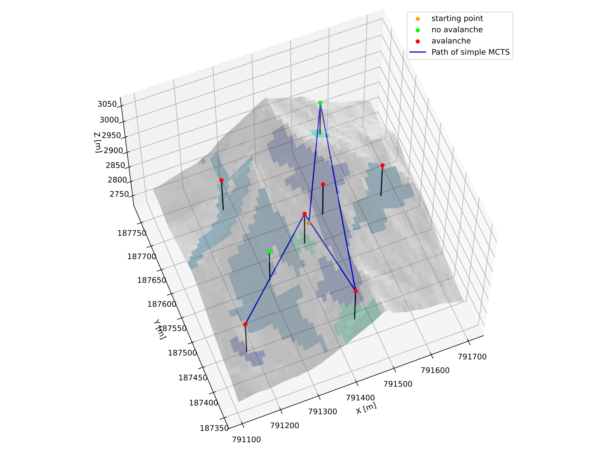
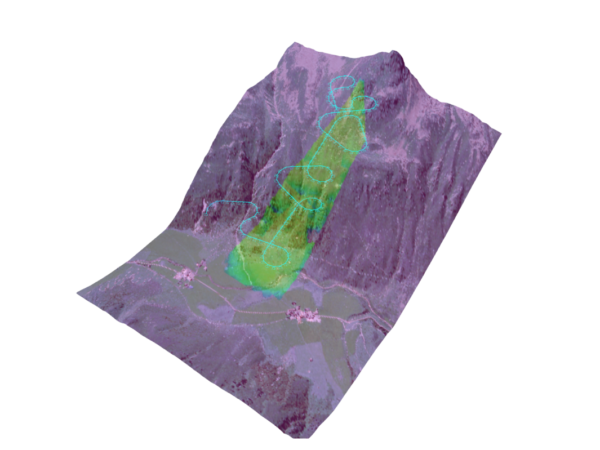
Terrain Navigation
Navigating in steep terrain with a fixed wing vehicle is challenging due to the constrained dynamics of the vehicle. Fixed wing vehicles are limited with […]

2021-2022 Winter Trials
The first winter testing of the new platform was conducted in Davos, Switzerland. The goal of the winter trials was to evaluate the integration of […]

2021 Spring Trials
A first data campaign was done in Davos to better understand the challenges and gather preliminary data. A sensor payload was attached to a DJI […]
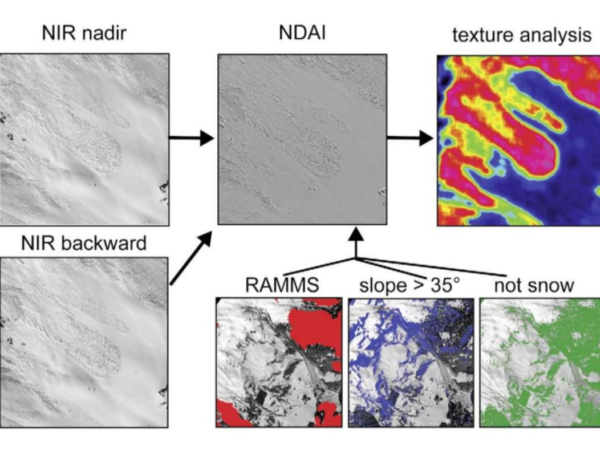
Near Infrared Mapping
In the AVALMAPPER project, we aim to use NIR imagery for mapping alpine areas. Previous work hasshown that the NIR spectrum is the best choice […]
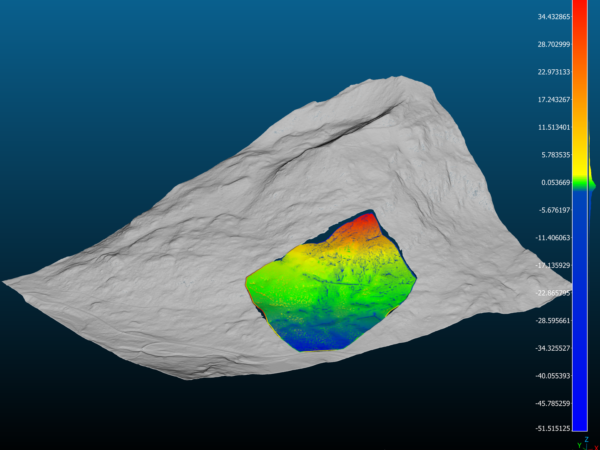
Active Terrain Mapping
Map reconstruction from camera imaging systems generally relies on features to build a 3Drepresentation of points in the imaged domain. There are multiple factors that […]