
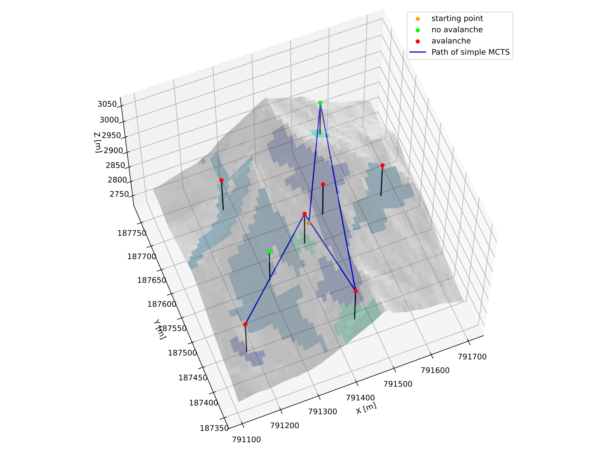
The challenge of using a small UAV for avalanche monitoring is that the vehicle has a limited range (~100km), but the area of interest is […]
Vehicle-based photogrammetry system for avalanche detection
ETH student Andri Bisaz recently completed his semester thesis titled “Vehicle-based photogrammetry system for avalanche detection” as part of the AvalMapper project with the support […]

2021-2022 Winter Trials
The first winter testing of the new platform was conducted in Davos, Switzerland. The goal of the winter trials was to evaluate the integration of […]

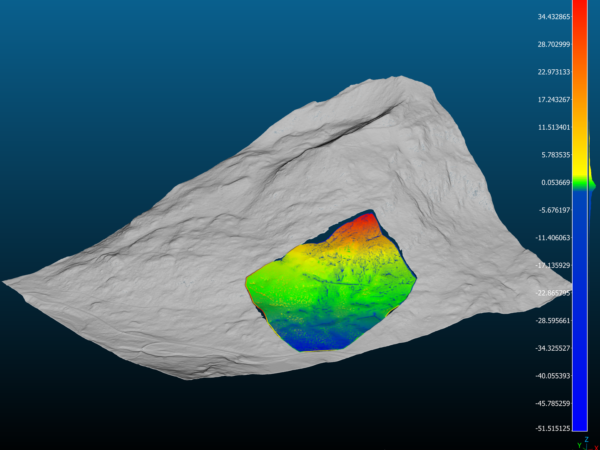
2021 Spring Trials
A first data campaign was done in Davos to better understand the challenges and gather preliminary data. A sensor payload was attached to a DJI […]