

ETH student Andri Bisaz recently completed his semester thesis titled “Vehicle-based photogrammetry system for avalanche detection” as part of the AvalMapper project with the support of the Autonomous Systems Lab (ASL) and the Institute for Snow and Avalanche Research (SLF). SLF currently sends out human teams to collect in-situ data for safety critical avalanche advice bulletins. This data includes direct measurements such as snow depth as well as images of avalanche-affected areas. This data is then passed back to the SLF offices in Davos and processed by avalanche experts who make decisions on future avalanche warnings. The current manual process limits the amount and type of data that can be collected, as observers must stop, get out of their vehicles and take photos.
Andri’s thesis explored the use of photogrammetry – making 3D surface reconstructions from multiple images. Accurate 3D surface reconstructions can be used alongside snow-free terrain models and previous reconstructions of the same scene to estimate snow depth and avalanche release volumes and locations. Of course, generating accurate, geolocated 3D reconstructions typically requires precise estimation of the camera location.
Andri wanted to address the problem of generating accurate surface reconstructions using only photographs taken from a moving vehicle. Avalanche prediction near mountain roads is of particular interest to SLF as these areas carry high risk of damage or disruption if avalanches occur. Andri developed a proof-of-concept system that can be mounted on a car to automatically take images using a high resolution camera. The device uses on-board GNSS with post-processed kinematic (PPK) corrections to estimate the position of the moving camera to within ~10cm. These images can then be passed to commercially-available photogrammetry software for reconstruction, resulting in accuracy as high as 0.5m in target regions ~600m from the road.

The system can be attached to most vehicles using a suction-cup mount, and can be configured to automatically capture images of target regions while driving along mountain roads, without requiring the vehicle to stop or the driver to leave the car. Such a system would allow field observers to collect valuable quantitative information and enrich the data available to SLF for making avalanche predictions. The next steps of the project are to consider how to make the system more robust and to start wider trials in real snow conditions.

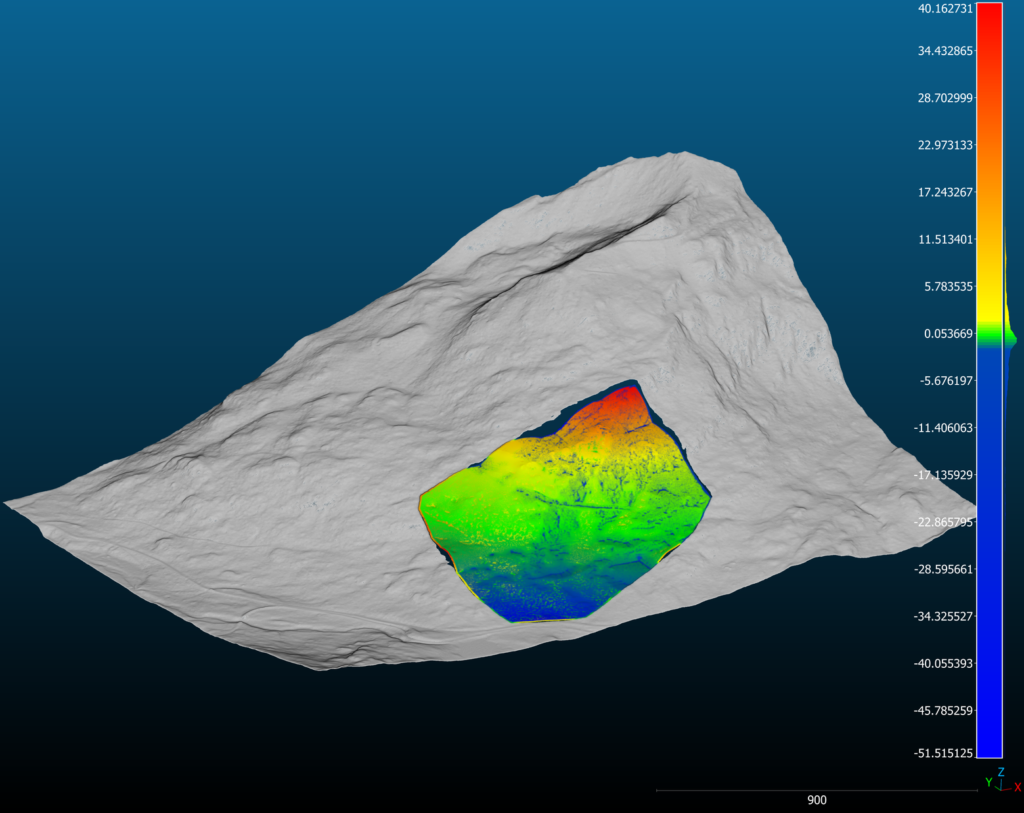
Images show one of the test sites at Bernina Pass. Images captured from the road are indicated by red dots (left), and the reconstructed surface (colored patch, right) is overlaid on an accurate reconstruction from the swissalti3D model (grey), a high resolution terrain model generated by Swisstopo. The differences between the reconstructions are indicated by the colours, with green being within approximately 1m. The reconstruction is most accurate at the target range of ~600m from the road.
Acknowledgements
This project was done as part of a semester thesis, in collaboration with SLF(WSL-Institut für Schnee- und Lawinenforschung SLF) and the Autonomous Systems Lab, ETH Zurich.