

The challenge of using a small UAV for avalanche monitoring is that the vehicle has a limited range (~100km), but the area of interest is larger than what the vehicle can cover. Therefore it is important that the vehicle is guided to the right places to maximize information gathered from each flight. ETH Zurich student Jonas Walther has successfully completed his semester thesis “Topological Path Planning for Avalanche Monitoring using Fixed wing UAVs”. The goal of the project was to explore the idea of autonomously gathering avalanche information on potential release areas(PRA) without prior knowledge of where the avalanche has triggered.
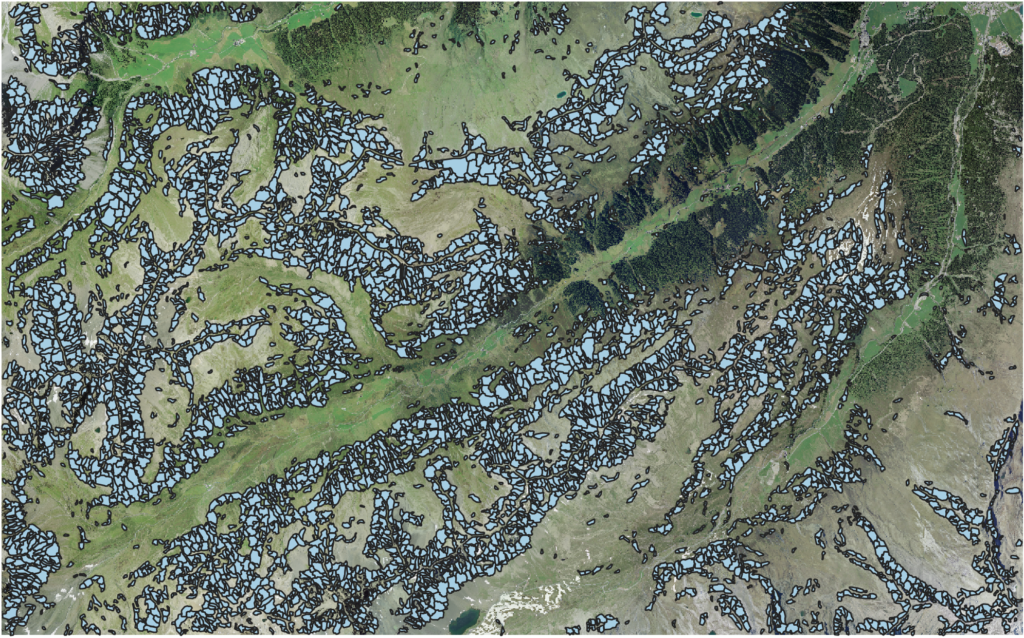
Since avalanches happen only when certain conditions are met, there is no need for the vehicle to visit regions that are not part of the hazard area. The possible areas where the avalanche can be released are marked in the figure above in the Dischma valley, Davos, Switzerland. Therefore the decision to explore a potential avalanche release area(PRA) can be considered as a discrete action. If there is an avalanche already in the PRA the vehicle maps the avalanche while if there is no avalanche, the vehicle continues to the next PRA. One constraint of the vehicle is that the vehicle needs to be able to return to the starting point within the maximum range of the vehicle. Since the vehicle does not know whether the avalanche has been triggered before we visit the PRA, a probabilistic tree is constructed.

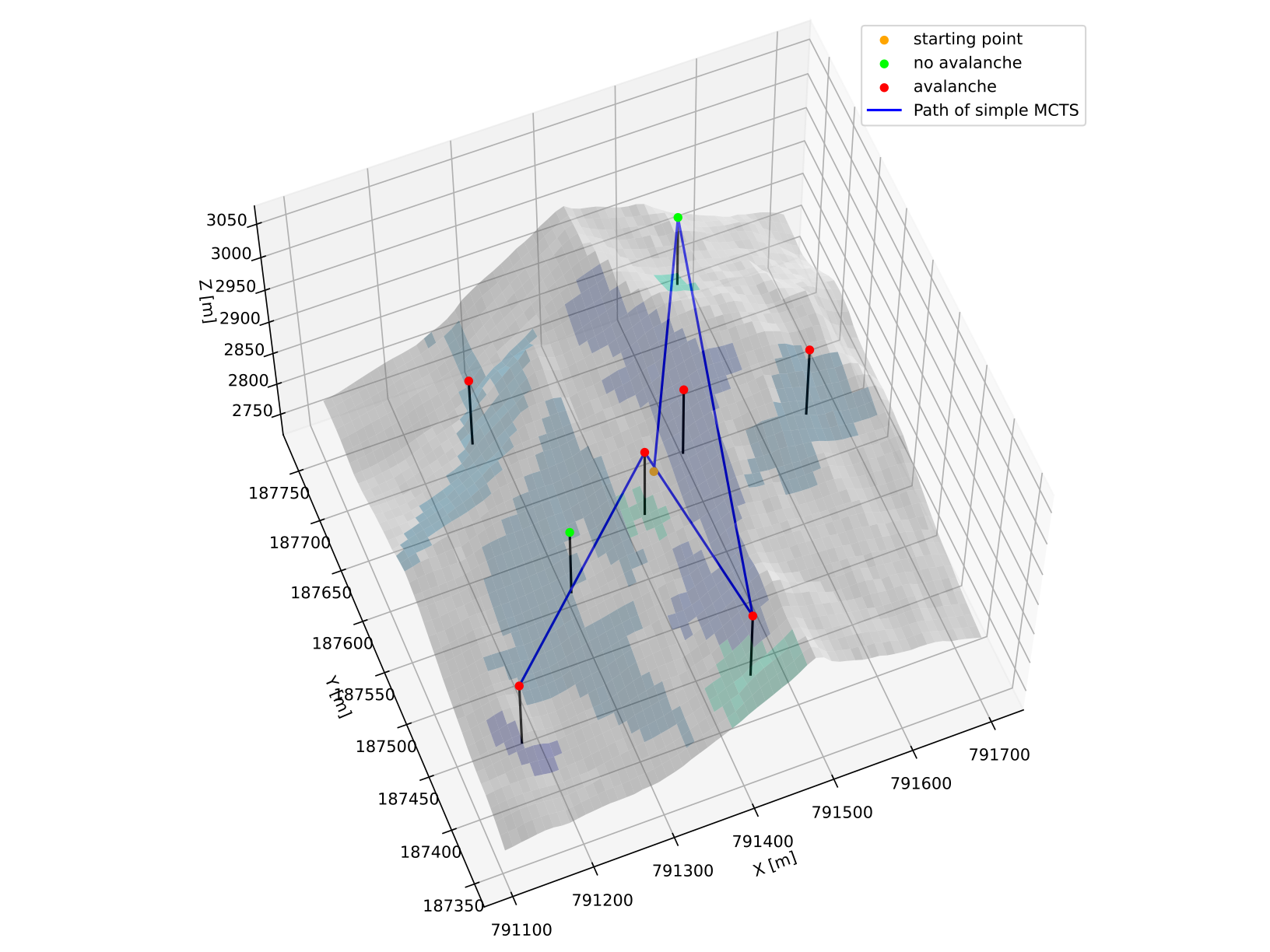
In this project, a Monte-Carlo Tree Search algorithm was used to find the optimal policy on which PRAs the vehicle can visit. A picture of a small example with 8 PRAs are shown above. The left shows when using a greedy policy that maximizes the reward for the next step while the right side shows the policy from MCTS. The project also proposed a novel double-tree MCTS algorithm, which tries to exploit the fact that the vehicle needs to return to the starting point.
By allowing the vehicle to autonomously make decisions which maximizes the information acquired by the vehicle, we believe that the vehicle will be able to find more useful information for understanding avalanche processes.
For more details, the thesis can be accessed in the following link
https://doi.org/10.3929/ethz-b-000559560 : Autonomous Information Gathering for Avalanche MappingAcknowledgements
This project was done as part of a semester thesis, in collaboration with SLF(WSL-Institut für Schnee- und Lawinenforschung SLF) and the Autonomous Systems Lab, ETH Zurich.